
Alan Mathison Turing was an English mathematician, logician, cryptanalyst, andcomputer scientist. He was highly influential in the development of computer science, giving a formalisation of the concepts of "algorithm" and "computation" with the Turing machine, which can be considered a model of a general purpose computer.Turing is widely considered to be the father of computer science and artificial intelligence.
During World War II, Turing worked for the Government Code and Cypher School (GCCS) at Bletchley Park, Britain's codebreaking centre. For a time he was head of Hut 8, the section responsible for German naval cryptanalysis. He devised a number of techniques for breaking German ciphers, including the method of the bombe, an electromechanical machine that could find settings for the Enigma machine
.

This bombsight mechanical computer was used on board Lancaster and other aircraft in the Second World War. It was used to aim the bombs, taking factors such as aircraft height and speed and weather conditions into account. Unlike electronic computers, which are programmed using software, mechanical computers carried out their computations according to the physical shape and design of the mechanism. The gears, linkages and cams literally embodied the equations that needed to be solved.
After the war he worked at the National Physical Laboratory, where he created one of the first designs for a stored-program computer, the ACE. In 1948 Turing joined Max Newman's Computing Laboratory at Manchester University, where he assisted in the development of the Manchester computers.
The Pilot ACE was one of the first computers built in the United Kingdom, at the National Physical Laboratory (NPL) in the early 1950s.
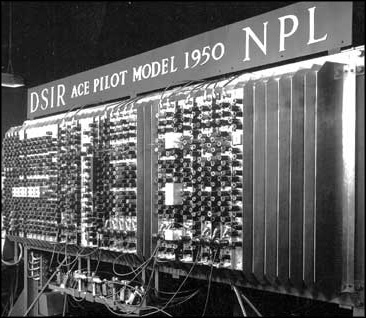 It was a preliminary version of the full ACE, which had been designed by Alan Turing. After Turing left NPL (in part because he was disillusioned by the lack of progress on building the ACE), James H. Wilkinson took over the project, Harry Huskey helped with the design. The Pilot ACE ran its first program on May 10, 1950 and was demonstrated to the press in December 1950.
It was a preliminary version of the full ACE, which had been designed by Alan Turing. After Turing left NPL (in part because he was disillusioned by the lack of progress on building the ACE), James H. Wilkinson took over the project, Harry Huskey helped with the design. The Pilot ACE ran its first program on May 10, 1950 and was demonstrated to the press in December 1950.
Codebreaker is an exhibition developed by the Science Museum to celebrate the centenary of the birth of this pioneering British figure.
At the heart of the exhibition is the Pilot ACE computer, built to Turing’s ground-breaking design. It is the most significant surviving Turing artefact in existence.
Alongside this remarkable machine is a sequence of exhibits showcasing Turing’s breadth of talent. Together with interactive exhibits, personal recollections and a wealth of historic imagery, the exhibition offers an absorbing retrospective view of one of Britain’s greatest twentieth-century thinkers.
Watch Video : http://www.youtube.com/watch?v=I3NkVMHh0_Q
Alan Turing I salute your centenary. Where would the world be without your work and as the father of Computer Science.
References:
- History of Computing in the Twentieth Century" edited by Gian-Carlo Rota et al, Academic Press (1980).
- J.H.Wilkinson, "Rounding Errors in Algebraic Processes", reprinted by Dover (1994).
- Sciencemuseum.org
- Agar, Jon (2003). The government machine: a revolutionary history of the computer. Cambridge, Massachusetts: MIT Press



















{kind=link}